





Động cơ bước vít me bi lai Nema 23 (57mm), góc bước 1,8°, 4 dây dẫn, dùng cho thiết bị chẩn đoán y tế.
Động cơ bước vít me bi lai Nema 23 (57mm), góc bước 1,8°, 4 dây dẫn, dùng cho thiết bị chẩn đoán y tế.
Động cơ bước lai Nema 23 (57mm), lưỡng cực, 4 dây dẫn, vít me bi, độ ồn thấp, tuổi thọ cao, hiệu suất cao, đạt chứng nhận CE và RoHS.
Tải trọng lớn, độ rung nhỏ, tiếng ồn thấp, tốc độ nhanh, phản hồi nhanh, vận hành êm ái, tuổi thọ cao, độ chính xác định vị cao (lên đến ±0.005mm)
Sự miêu tả
| Tên sản phẩm | Động cơ bước vít me bi lai 57mm |
| Người mẫu | VSM57BSHSM |
| Kiểu | động cơ bước lai |
| Góc bậc thang | 1,8° |
| Điện áp (V) | 2,3 / 3 / 3,1 / 3,8 |
| Dòng điện (A) | 3/4 |
| Điện trở (Ohm) | 0,75 / 1 / 0,78 / 0,95 |
| Độ tự cảm (mH) | 2,5 / 4,5 / 3,3 / 4,5 |
| Dây dẫn | 4 |
| Chiều dài động cơ (mm) | 45 / 55 / 65 / 75 |
| Nhiệt độ môi trường xung quanh | -20℃ ~ +50℃ |
| Nhiệt độ tăng | Tối đa 80K. |
| Độ bền điện môi | Dòng điện tối đa 1mA @ 500V, 1KHz, 1 giây. |
| Điện trở cách điện | Điện trở tối thiểu 100MΩ @500Vdc |
Chứng chỉ

Thông số điện:
| Kích thước động cơ | Điện áp /Giai đoạn (V) | Hiện hành /Giai đoạn (MỘT) | Sức chống cự /Giai đoạn (Ω) | Độ tự cảm /Giai đoạn (mH) | Số lượng Dây dẫn | Quán tính rôto (g.cm2) | Trọng lượng động cơ (g) | Chiều dài động cơ L (mm) |
| 57 | 2.3 | 3 | 0,75 | 2,5 | 4 | 150 | 580 | 45 |
| 57 | 3 | 3 | 1 | 4,5 | 4 | 300 | 710 | 55 |
| 57 | 3.1 | 4 | 0,78 | 3.3 | 4 | 400 | 880 | 65 |
| 57 | 3.8 | 4 | 0,95 | 4,5 | 4 | 480 | 950 | 75 |
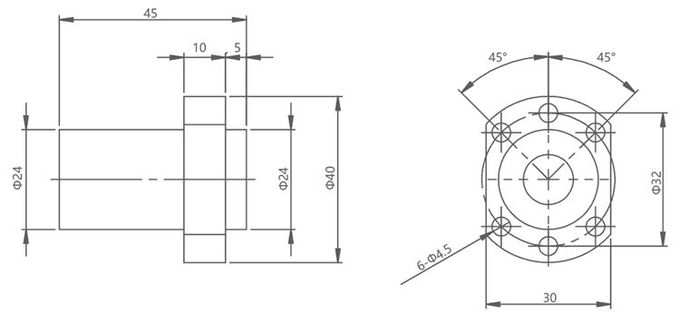
Bản vẽ phác thảo động cơ ngoài tiêu chuẩn VSM57BSHSM:
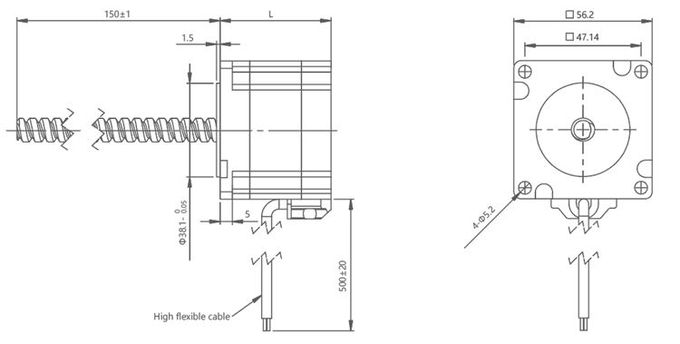
Ghi chú:
Chiều dài vít me có thể được tùy chỉnh.
Gia công theo yêu cầu là khả thi ở cuối trục vít dẫn hướng.
Vui lòng liên hệ với chúng tôi để biết thêm thông số kỹ thuật về vít me bi.
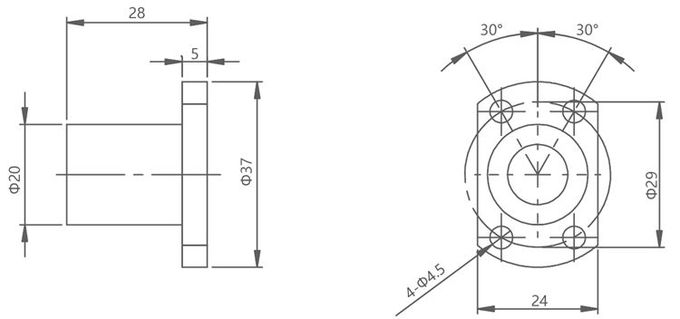
Bản vẽ phác thảo đai ốc bi VSM57BSHSMBall 1202:
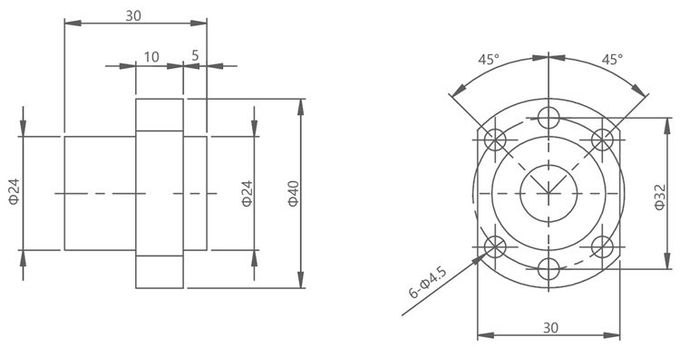
Bản vẽ phác thảo đai ốc bi VSM57BSHSMBall 1205:
Bản vẽ phác thảo đai ốc bi VSM57BSHSMBall 1210:
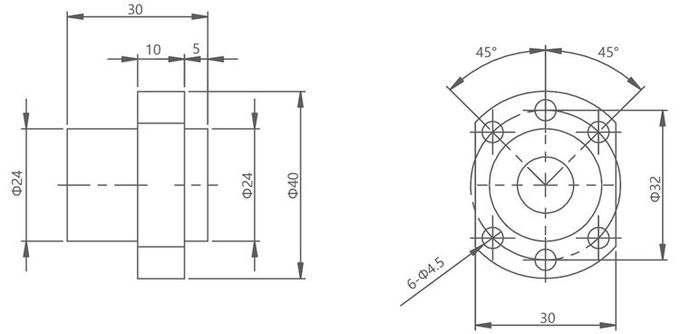
Bản vẽ phác thảo đai ốc bi VSM57BSHSMBall 1210:
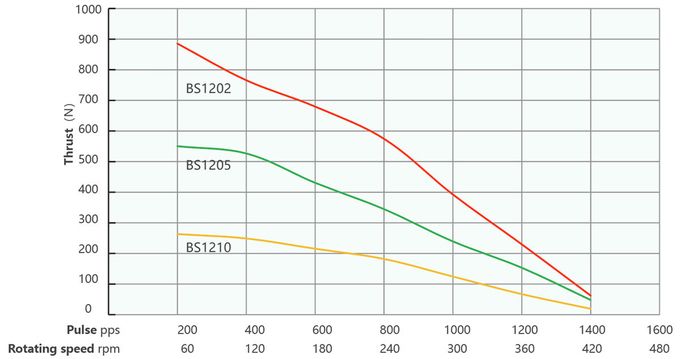
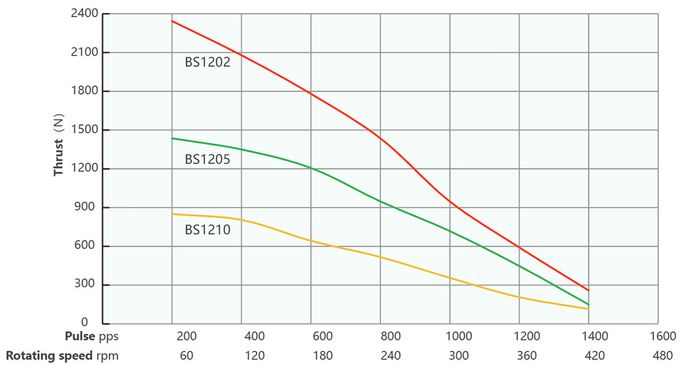
Đường cong tốc độ và lực đẩy
Bộ điều khiển băm xung lưỡng cực dòng 57, chiều dài động cơ 45mm
Tần số xung dòng điện 100% và đường cong lực đẩy
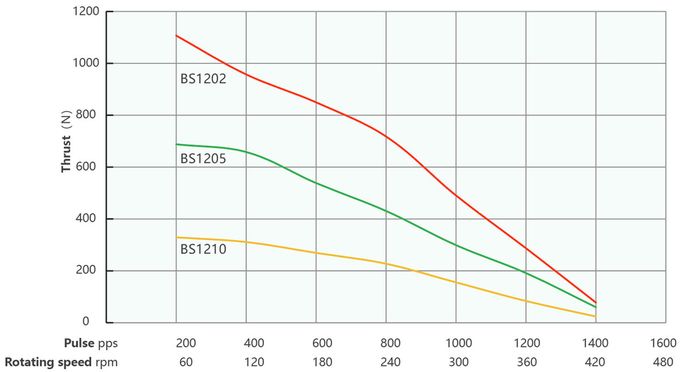
Bộ điều khiển băm xung lưỡng cực dòng 57, chiều dài động cơ 55mm
Tần số xung dòng điện 100% và đường cong lực đẩy
| Chì (mm) | Vận tốc tuyến tính (mm/s) | |||||||
| 2 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 |
| 5 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 |
| 10 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 |
Điều kiện thử nghiệm:Mạch điều khiển băm xung, không có chức năng tăng giảm tốc độ, chế độ vi bước một nửa, điện áp điều khiển 40V.
Bộ điều khiển băm xung lưỡng cực dòng 57, chiều dài động cơ 65mm
Tần số xung dòng điện 100% và đường cong lực đẩy
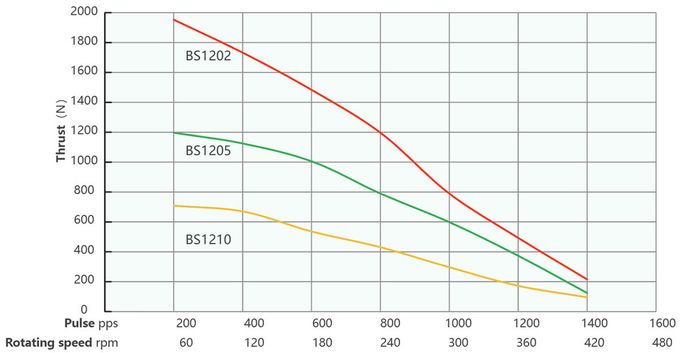
Bộ điều khiển băm xung lưỡng cực dòng 57, chiều dài động cơ 75mm
Tần số xung dòng điện 100% và đường cong lực đẩy
| Chì (mm) | Vận tốc tuyến tính (mm/s) | |||||||
| 2 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 |
| 5 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 |
| 10 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 |
Điều kiện thử nghiệm:Mạch điều khiển băm xung, không có chức năng tăng giảm tốc độ, chế độ vi bước một nửa, điện áp điều khiển 40V.
Lĩnh vực ứng dụng:
Thiết bị chẩn đoán y tế:Động cơ bước vít me bi lai 57mm có thể được sử dụng trong các thiết bị chẩn đoán y tế như máy quét hình ảnh, máy quét CT, thiết bị X-quang, thiết bị MRI, v.v. Khả năng điều khiển vị trí chính xác cao và độ ổn định của chúng cho phép chuyển động và định vị chính xác trong quá trình thu thập và xử lý hình ảnh y tế.
Dụng cụ khoa học sinh học:Trong nghiên cứu và thí nghiệm khoa học sự sống, động cơ bước vít me bi lai 57mm được sử dụng trong các hệ thống xử lý chất lỏng tự động, thiết bị sàng lọc tốc độ cao, thiết bị nuôi cấy tế bào, máy giải trình tự gen, và nhiều ứng dụng khác. Độ chính xác và độ tin cậy cao của các động cơ này cho phép chúng đáp ứng nhu cầu điều khiển chuyển động và vị trí chính xác trong các thiết bị thí nghiệm.
Người máy:Động cơ bước vít me bi lai 57mm được sử dụng rộng rãi trong robot học cho các khớp nối, chuyển động cánh tay robot và định vị chính xác. Các động cơ này có đặc điểm là mô-men xoắn cao, độ phân giải cao và độ ồn thấp để đáp ứng nhu cầu về chuyển động và điều khiển chính xác trong các ứng dụng robot.
Thiết bị laser:Động cơ bước vít me bi lai 57mm có thể được sử dụng trong thiết bị laser cho các tác vụ như điều chỉnh tiêu cự, xoay bàn và điều khiển đường dẫn quang học. Khả năng điều khiển vị trí chính xác cao và độ ổn định tốt cho phép nó thực hiện việc lấy nét và định vị chùm tia laser một cách chính xác.
Dụng cụ phân tích:Trong nhiều loại thiết bị phân tích phòng thí nghiệm, động cơ bước vít me bi lai 57mm có thể được sử dụng trong xử lý mẫu tự động, hệ thống cấp mẫu, máy sắc ký lỏng, máy sắc ký khí, v.v. Chuyển động chính xác cao và hiệu suất ổn định của các động cơ này đóng vai trò quan trọng trong việc nâng cao độ chính xác và hiệu quả của phân tích phòng thí nghiệm.
Thiết bị sản xuất chất bán dẫn và điện tử:Động cơ bước vít me bi lai 57mm được sử dụng để định vị chính xác và điều khiển tự động hóa trong thiết bị sản xuất bán dẫn và điện tử. Ví dụ, chúng có thể được sử dụng trong thiết bị kiểm tra chip bán dẫn, máy đóng gói, công nghệ gắn bề mặt, sản xuất mạch in và các lĩnh vực khác để cung cấp khả năng điều khiển chuyển động tốc độ cao, độ chính xác cao và đáng tin cậy.
Thiết bị tự động hóa phi tiêu chuẩn và các loại thiết bị tự động hóa khác nhau:Động cơ bước vít me bi lai 57mm phù hợp với nhiều loại thiết bị tự động hóa phi tiêu chuẩn và dây chuyền sản xuất tự động. Chúng có thể được sử dụng trong thiết bị định vị, hệ thống lắp ráp tự động, thiết bị đóng gói, máy in, thiết bị dệt may, v.v. Chúng cung cấp khả năng điều khiển vị trí chính xác và hiệu suất chuyển động đáng tin cậy để đáp ứng nhu cầu tự động hóa trong các lĩnh vực khác nhau.
Lợi thế
Tỷ lệ mô-men xoắn trên quán tính cao:Động cơ bước vít me bi lai có tỷ lệ mô-men xoắn trên quán tính cao, nghĩa là chúng có thể cung cấp mô-men xoắn đáng kể so với kích thước và trọng lượng của chúng. Điều này làm cho chúng trở nên lý tưởng cho các ứng dụng yêu cầu mô-men xoắn cao trong một hình dạng nhỏ gọn, chẳng hạn như robot, máy CNC và hệ thống tự động hóa.
Gia tốc và giảm tốc cao:Các động cơ này có khả năng tăng tốc và giảm tốc nhanh, cho phép chuyển động nhanh chóng và chính xác. Quán tính thấp của rôto và mô-men xoắn đầu ra cao giúp động cơ phản hồi nhanh chóng với các tín hiệu điều khiển, dẫn đến thời gian khởi động/dừng nhanh hơn và hiệu suất hệ thống tổng thể được cải thiện.
Điều chỉnh vi bước mượt mà:Động cơ bước vít me bi lai rất phù hợp cho chế độ vi bước, cho phép độ phân giải cao hơn và điều khiển chuyển động mượt mà hơn. Vi bước chia mỗi bước đầy đủ thành các bước phụ nhỏ hơn, giảm kích thước bước và giảm thiểu rung động, tiếng ồn và hiệu ứng cộng hưởng. Tính năng này đặc biệt có lợi trong các ứng dụng yêu cầu chuyển động mượt mà và chính xác, chẳng hạn như máy in 3D và hệ thống định vị tuyến tính.
Phản hồi thấp:Cơ cấu vít me bi trong các động cơ này giúp giảm thiểu độ rơ, tức là độ lỏng hoặc khe hở giữa rôto và tải trọng. Độ rơ thấp đảm bảo định vị chính xác và tính lặp lại, vì có rất ít chuyển động bị mất khi thay đổi hướng hoặc đảo chiều chuyển động. Điều này rất quan trọng đối với các ứng dụng yêu cầu định vị chính xác và có thể lặp lại, chẳng hạn như máy gắp và đặt linh kiện và hệ thống quang học.
Phản hồi động cao:Sự kết hợp giữa động cơ bước lai và cơ cấu vít me bi cho phép phản hồi động học cao, có nghĩa là động cơ có thể nhanh chóng và chính xác theo sát các thay đổi trong tín hiệu điều khiển. Khả năng phản hồi này rất cần thiết cho các ứng dụng liên quan đến sự thay đổi nhanh chóng về tốc độ, hướng hoặc vị trí, chẳng hạn như gia công tốc độ cao và hệ thống điều khiển chuyển động động học.
Hiệu suất nhiệt:Động cơ bước vít me bi lai được thiết kế để có hiệu suất tản nhiệt tốt, cho phép tản nhiệt hiệu quả trong quá trình hoạt động. Điều này giúp ngăn ngừa quá nhiệt và đảm bảo hiệu suất hoạt động ổn định của động cơ, ngay cả khi sử dụng trong thời gian dài hoặc trong các ứng dụng đòi hỏi cao.
Giải pháp tiết kiệm chi phí:Động cơ bước vít me bi lai cung cấp giải pháp tiết kiệm chi phí cho các ứng dụng đòi hỏi độ chính xác và mô-men xoắn cao. So với các hệ thống động cơ servo phức tạp và đắt tiền hơn, động cơ bước lai mang lại sự cân bằng giữa hiệu suất, chi phí và tính dễ sử dụng. Chúng thường là lựa chọn ưu tiên cho các ứng dụng mà chi phí là yếu tố quan trọng, mà không làm giảm chất lượng và hiệu suất.
Yêu cầu khi lựa chọn động cơ:
►Hướng di chuyển/lắp đặt
►Yêu cầu tải
►Yêu cầu về đột quỵ
►Yêu cầu gia công cuối
►Yêu cầu về độ chính xác
►Yêu cầu phản hồi của bộ mã hóa
►Yêu cầu điều chỉnh thủ công
►Yêu cầu về môi trường
Xưởng sản xuất






