.jpg)
.jpg)
.jpg)
.jpg)
Động cơ bước lai Nema 23 (57mm), lưỡng cực, 4 dây dẫn, vít me ACME, độ ồn thấp, tuổi thọ cao, hiệu suất cao.
Động cơ bước lai Nema 23 (57mm), lưỡng cực, 4 dây dẫn, vít me ACME, độ ồn thấp, tuổi thọ cao, hiệu suất cao.
Động cơ bước lai 57mm này có ba loại: dẫn động ngoài, dẫn động xuyên trục và dẫn động xuyên trục cố định. Bạn có thể lựa chọn theo nhu cầu cụ thể của mình.
Động cơ này có các kích thước 20mm, 28mm, 35mm, 42mm, 57mm, 86mm.
Chiều dài bước: 0,001524mm~0,127mm
Hiệu năng: Lực đẩy tối đa lên đến 240kg, nhiệt độ tăng thấp, độ rung thấp, tiếng ồn thấp, tuổi thọ cao (lên đến 5 triệu chu kỳ), độ chính xác định vị cao (lên đến ±0,01 mm).
Mô tả
| Tên sản phẩm | Động cơ bước lai 57mm |
| Người mẫu | VSM57HSM |
| Kiểu | động cơ bước lai |
| Góc bậc thang | 1,8° |
| Điện áp (V) | 2,3 / 3 / 3,1 / 3,8 |
| Dòng điện (A) | 3/4 |
| Điện trở (Ohm) | 0,75 / 1 / 0,78 / 0,95 |
| Độ tự cảm (mH) | 2,5 / 4,5 / 3,3 / 4,5 |
| Dây dẫn | 4 |
| Chiều dài động cơ (mm) | 45 / 55 / 65 / 75 |
| Nhiệt độ môi trường xung quanh | -20℃ ~ +50℃ |
| Nhiệt độ tăng | Tối đa 80K. |
| Độ bền điện môi | Dòng điện tối đa 1mA @ 500V, 1KHz, 1 giây. |
| Điện trở cách điện | Điện trở tối thiểu 100MΩ @500Vdc |
Chứng chỉ

Thông số điện:
| Kích thước động cơ | Điện áp /Giai đoạn (V) | Hiện hành /Giai đoạn (MỘT) | Sức chống cự /Giai đoạn (Ω) | Độ tự cảm /Giai đoạn (mH) | Số lượng Dây dẫn | Quán tính rôto (g.cm2) | Trọng lượng động cơ (g) | Chiều dài động cơ L (mm) |
| 57 | 2.3 | 3 | 0,75 | 2,5 | 4 | 150 | 580 | 45 |
| 57 | 3 | 3 | 1 | 4,5 | 4 | 300 | 710 | 55 |
| 57 | 3.1 | 4 | 0,78 | 3.3 | 4 | 400 | 880 | 65 |
| 57 | 3.8 | 4 | 0,95 | 4,5 | 4 | 480 | 950 | 75 |
Thông số kỹ thuật và thông số hiệu suất của vít me
| Đường kính (mm) | Chỉ huy (mm) | Bước chân (mm) | Lực tự khóa khi tắt nguồn (N) |
| 9,525 | 1,27 | 0,00635 | 800 |
| 9,525 | 2,54 | 0,0127 | 300 |
| 9,525 | 5.08 | 0,0254 | 90 |
| 9,525 | 10.16 | 0,0508 | 30 |
| 9,525 | 25.4 | 0.127 | 6 |
Lưu ý: Để biết thêm thông số kỹ thuật về trục vít dẫn hướng, vui lòng liên hệ với chúng tôi.
Bản vẽ phác thảo động cơ ngoài tiêu chuẩn VSM57HSM:
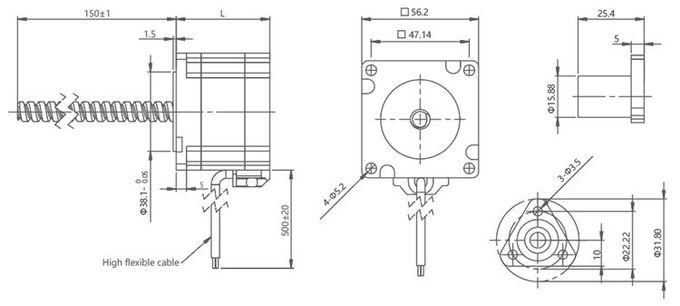
Ghi chú:
Chiều dài vít me có thể được tùy chỉnh.
Gia công theo yêu cầu là khả thi ở cuối trục vít dẫn hướng.
Bản vẽ phác thảo động cơ bước lai 57mm tiêu chuẩn (động cơ cố định):
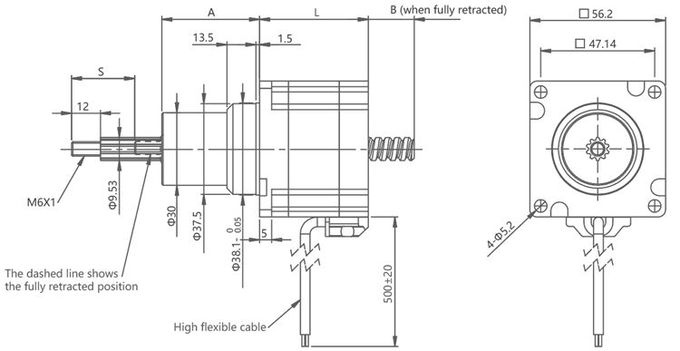
Ghi chú:
Gia công theo yêu cầu là khả thi ở cuối trục vít dẫn hướng.
| Đột quỵ (mm) | Kích thước A (mm) | Kích thước B (mm) | |||
| L = 45 | L = 55 | L = 65 | L = 75 | ||
| 12.7 | 24.1 | 1.1 | 0 | 0 | 0 |
| 19.1 | 30,5 | 7.5 | 0 | 0 | 0 |
| 25.4 | 36,8 | 13,8 | 4.8 | 0 | 0 |
| 31,8 | 43.2 | 20.2 | 11.2 | 0,2 | 0 |
| 38.1 | 49,5 | 26,5 | 17,5 | 6,5 | 0 |
| 50,8 | 62.2 | 39,2 | 30.2 | 19.2 | 9.1 |
| 63,5 | 74,9 | 51,9 | 42,9 | 31,9 | 21,9 |
Bản vẽ phác thảo động cơ bước lai 57mm tiêu chuẩn, loại cố định xuyên suốt.
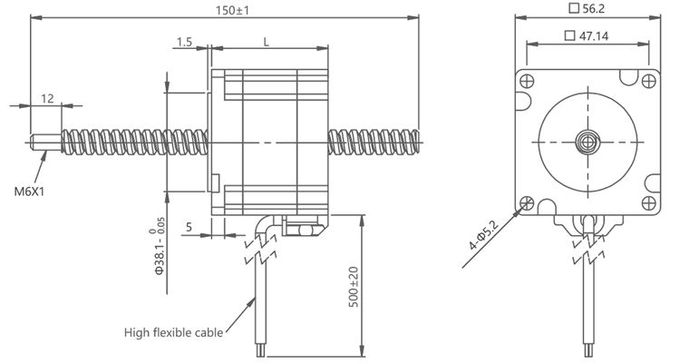
Ghi chú:
Chiều dài vít me có thể được tùy chỉnh.
Gia công theo yêu cầu là khả thi ở cuối trục vít dẫn hướng.
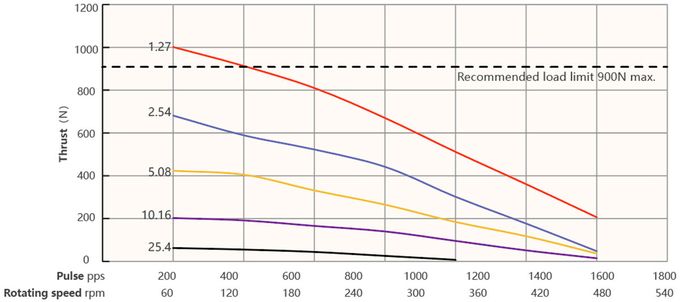
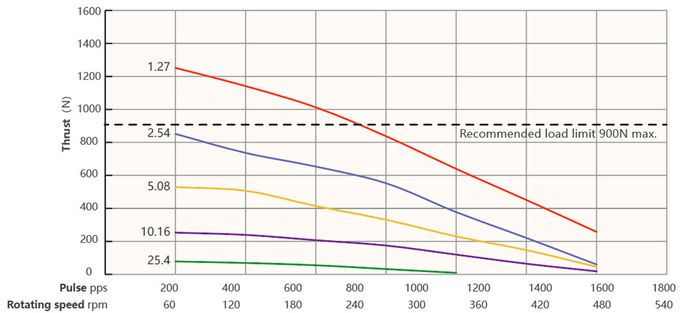
Đường cong tốc độ và lực đẩy:
Bộ điều khiển băm xung lưỡng cực dòng 57, chiều dài động cơ 45mm
Tần số xung dòng điện 100% và đường cong lực đẩy (vít dẫn hướng Φ9.525mm)
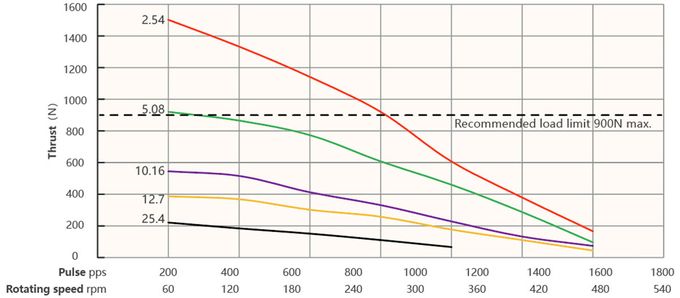
Bộ điều khiển băm xung lưỡng cực dòng 57, chiều dài động cơ 55mm
Tần số xung dòng điện 100% và đường cong lực đẩy (vít dẫn hướng Φ9.525mm)
| Chì (mm) | Vận tốc tuyến tính (mm/s) | ||||||||
| 1,27 | 1,27 | 2,54 | 3,81 | 5.08 | 6,35 | 7,62 | 8,89 | 10.16 | 11,43 |
| 2,54 | 2,54 | 5.08 | 7,62 | 10.16 | 12.7 | 15.24 | 17,78 | 20,32 | 22,86 |
| 5.08 | 5.08 | 10.16 | 15.24 | 20,32 | 25.4 | 30,48 | 35,56 | 40,64 | 45,72 |
| 10.16 | 10.16 | 20,32 | 30,48 | 40,64 | 50,8 | 60,96 | 71,12 | 81,28 | 91,44 |
| 25.4 | 25.4 | 50,8 | 76,2 | 101,6 | 127 | 152,4 | 711,8 | 203.2 | 228,6 |
Điều kiện thử nghiệm:
Mạch điều khiển băm xung, không có chức năng tăng giảm tốc độ, chế độ vi bước một nửa, điện áp điều khiển 40V.
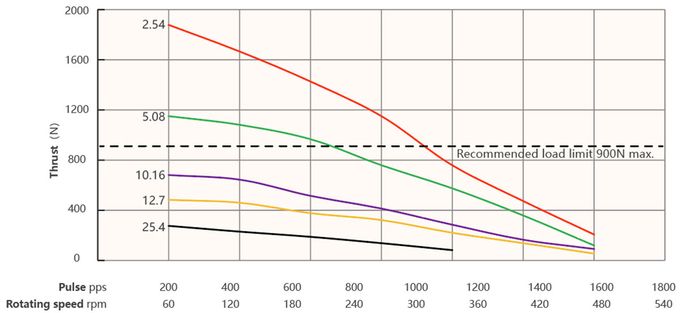
Bộ điều khiển băm xung lưỡng cực dòng 57, chiều dài động cơ 65mm
Tần số xung dòng điện 100% và đường cong lực đẩy (vít dẫn hướng Φ9.525mm)
Bộ điều khiển băm xung lưỡng cực dòng 57, chiều dài động cơ 75mm
Tần số xung dòng điện 100% và đường cong lực đẩy (vít dẫn hướng Φ9.525mm)
| Chì (mm) | Vận tốc tuyến tính (mm/s) | ||||||||
| 1,27 | 1,27 | 2,54 | 3,81 | 5.08 | 6,35 | 7,62 | 8,89 | 10.16 | 11,43 |
| 2,54 | 2,54 | 5.08 | 7,62 | 10.16 | 12.7 | 15.24 | 17,78 | 20,32 | 22,86 |
| 5.08 | 5.08 | 10.16 | 15.24 | 20,32 | 25.4 | 30,48 | 35,56 | 40,64 | 45,72 |
| 10.16 | 10.16 | 20,32 | 30,48 | 40,64 | 50,8 | 60,96 | 71,12 | 81,28 | 91,44 |
| 25.4 | 25.4 | 50,8 | 76,2 | 101,6 | 127 | 152,4 | 711,8 | 203.2 | 228,6 |
Điều kiện thử nghiệm:
Mạch điều khiển băm xung, không có chức năng tăng giảm tốc độ, chế độ vi bước một nửa, điện áp điều khiển 40V.
Các lĩnh vực ứng dụng
In 3D:Động cơ bước lai 57mm được sử dụng rộng rãi trong máy in 3D để điều khiển vị trí và chuyển động của đầu in.
Máy công cụ CNC:Trong máy công cụ điều khiển số bằng máy tính (CNC), động cơ bước lai 57mm được sử dụng để điều khiển chuyển động của các dụng cụ cắt nhằm thực hiện các thao tác gia công chính xác.
Thiết bị tự động hóa:Động cơ bước lai 57mm có thể được sử dụng trong nhiều thiết bị tự động hóa khác nhau, chẳng hạn như máy đóng gói tự động, hệ thống phân loại tự động, dây chuyền lắp ráp tự động, v.v., để điều khiển chuyển động và định vị.
Máy móc dệt may:Trong ngành công nghiệp dệt may, động cơ bước lai 57mm có thể được sử dụng để điều khiển máy kéo sợi, máy dệt và các thiết bị khác nhằm đảm bảo độ chính xác và ổn định của quy trình dệt.
Thiết bị y tế:Động cơ bước lai 57mm được sử dụng rộng rãi trong các thiết bị y tế như bơm tiêm y tế, robot y tế, thiết bị quét hình ảnh, v.v. để điều khiển vị trí và chuyển động chính xác.
Người máy:Động cơ bước lai 57mm được sử dụng trong nhiều ứng dụng robot khác nhau, bao gồm robot công nghiệp, robot dịch vụ, robot cộng tác, v.v., để chuyển động và thao tác chính xác.
Hệ thống kho tự động:Trong các hệ thống kho bãi và hậu cần tự động, động cơ bước lai 57mm có thể được sử dụng để điều khiển băng tải, thang máy, cần cẩu xếp dỡ và các thiết bị khác nhằm đạt được vị trí và thao tác xử lý hàng hóa chính xác.
Đây chỉ là một số ứng dụng điển hình của động cơ bước lai 57mm, và trên thực tế, chúng được sử dụng rộng rãi trong nhiều lĩnh vực khác, bao gồm thiết bị in ấn, hệ thống an ninh, dụng cụ chính xác, v.v.
Lợi thế
Tỷ lệ mô-men xoắn trên kích thước cao:Mặc dù có kích thước nhỏ gọn, động cơ bước lai 57mm có thể cung cấp mô-men xoắn cao. Điều này làm cho chúng phù hợp với các ứng dụng có không gian hạn chế nhưng lại yêu cầu mô-men xoắn cao.
Điều khiển vòng hở:Động cơ bước lai có thể hoạt động trong hệ thống điều khiển vòng hở, nghĩa là chúng không cần các thiết bị phản hồi vị trí như bộ mã hóa. Điều này giúp đơn giản hóa hệ thống điều khiển và giảm chi phí tổng thể.
Định vị chính xác:Động cơ bước lai cung cấp khả năng định vị chính xác nhờ độ phân giải bước vốn có của chúng. Chúng có thể di chuyển theo từng bước nhỏ, cho phép định vị chính xác và lặp lại tốt.
Hoạt động trơn tru:Động cơ bước lai có thể đạt được hoạt động êm ái, đặc biệt khi được điều khiển bằng kỹ thuật vi bước. Vi bước chia mỗi bước thành các bước nhỏ hơn, dẫn đến chuyển động mượt mà hơn và giảm rung động.
Thời gian phản hồi nhanh chóng:Động cơ bước lai có thời gian phản hồi nhanh, cho phép tăng tốc và giảm tốc nhanh chóng. Tính năng này rất hữu ích cho các ứng dụng yêu cầu chuyển động linh hoạt và nhanh nhẹn.
Độ tin cậy và độ bền cao:Động cơ bước lai nổi tiếng về độ bền và độ tin cậy. Chúng có tuổi thọ hoạt động lâu dài, yêu cầu bảo trì thấp và có thể chịu được các điều kiện hoạt động khắc nghiệt.
Giải pháp tiết kiệm chi phí:So với các công nghệ điều khiển chuyển động khác như động cơ servo, động cơ bước lai thường mang lại giải pháp tiết kiệm chi phí hơn. Chúng cung cấp sự cân bằng tốt giữa hiệu suất và giá cả phải chăng.
Dễ dàng tích hợp:Động cơ bước lai (hybrid stepper motor) được sử dụng rộng rãi và tương thích với nhiều thiết bị điện tử điều khiển và hệ thống điều khiển khác nhau. Chúng có thể dễ dàng tích hợp vào nhiều loại máy móc và hệ thống tự động hóa khác nhau.
Hiệu quả năng lượng:Động cơ bước lai chỉ tiêu thụ điện năng khi đang hoạt động, do đó tiết kiệm năng lượng. Khi đứng yên, chúng không cần nguồn điện liên tục, góp phần tiết kiệm năng lượng tổng thể.
Yêu cầu khi lựa chọn động cơ:
►Hướng di chuyển/lắp đặt
►Yêu cầu tải
►Yêu cầu về đột quỵ
►Yêu cầu gia công cuối
►Yêu cầu về độ chính xác
►Yêu cầu phản hồi của bộ mã hóa
►Yêu cầu điều chỉnh thủ công
►Yêu cầu về môi trường
Xưởng sản xuất


-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)