1. Cái gì làđộng cơ bước?
Động cơ bước hoạt động khác với các loại động cơ khác. Động cơ bước DC sử dụng chuyển động gián đoạn. Bên trong thân động cơ có nhiều nhóm cuộn dây, được gọi là "pha", và các nhóm này có thể quay bằng cách kích hoạt từng pha theo trình tự, từng bước một.
Bằng cách điều khiển động cơ bước thông qua bộ điều khiển/máy tính, bạn có thể định vị chính xác ở tốc độ chuẩn xác. Nhờ ưu điểm này, động cơ bước thường được sử dụng rộng rãi trong các thiết bị yêu cầu chuyển động chính xác.
Động cơ bước có nhiều kích thước, hình dạng và thiết kế khác nhau. Bài viết này sẽ giải thích cụ thể cách chọn động cơ bước phù hợp với nhu cầu của bạn.

2. Những ưu điểm củađộng cơ bước?
A. Định vị- Do chuyển động của động cơ bước chính xác và lặp đi lặp lại, chúng có thể được sử dụng trong nhiều sản phẩm điều khiển chính xác, chẳng hạn như in 3D, CNC, nền tảng camera, v.v. Một số ổ cứng cũng sử dụng động cơ bước để định vị đầu đọc.
B. Điều khiển tốc độ- Các bước chính xác cũng có nghĩa là bạn có thể kiểm soát chính xác tốc độ quay, phù hợp để thực hiện các thao tác chính xác hoặc điều khiển robot.
C. Tốc độ thấp và mô-men xoắn cao- Nhìn chung, động cơ DC có mô-men xoắn thấp ở tốc độ thấp. Nhưng động cơ bước có mô-men xoắn cực đại ở tốc độ thấp, vì vậy chúng là lựa chọn tốt cho các ứng dụng tốc độ thấp đòi hỏi độ chính xác cao.
3. Nhược điểm củađộng cơ bước :
A. Sự thiếu hiệu quả- Khác với động cơ DC, công suất tiêu thụ của động cơ bước không liên quan nhiều đến tải. Ngay cả khi không hoạt động, dòng điện vẫn chạy qua, do đó chúng thường gặp vấn đề quá nhiệt và hiệu suất thấp hơn.
B. Mô-men xoắn ở tốc độ cao- Thông thường, mô-men xoắn của động cơ bước ở tốc độ cao sẽ thấp hơn so với tốc độ thấp. Một số động cơ vẫn có thể đạt được hiệu suất tốt hơn ở tốc độ cao, nhưng điều này đòi hỏi bộ điều khiển tốt hơn để đạt được hiệu quả đó.
C. Không thể giám sát- Động cơ bước thông thường không thể phản hồi/phát hiện vị trí hiện tại của động cơ, chúng ta gọi đó là "điều khiển vòng hở". Nếu bạn cần điều khiển "vòng kín", bạn cần lắp đặt bộ mã hóa và bộ điều khiển để có thể giám sát/điều khiển chính xác sự quay của động cơ bất cứ lúc nào, nhưng chi phí rất cao và không phù hợp với các sản phẩm thông thường.
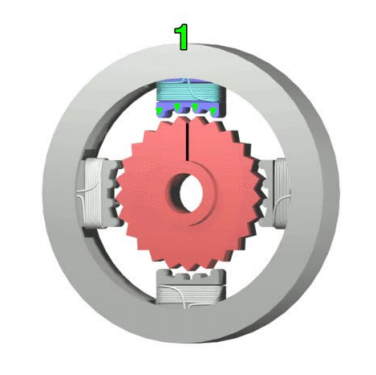
Pha động cơ bước
4. Phân loại các bước đi:
Có nhiều loại động cơ bước, phù hợp với nhiều tình huống khác nhau.
Tuy nhiên, trong điều kiện bình thường, động cơ PM và động cơ bước lai thường được sử dụng mà không cần xem xét đến động cơ dành cho máy chủ riêng.
5. Kích thước động cơ:
Yếu tố đầu tiên cần xem xét khi chọn động cơ là kích thước của động cơ. Động cơ bước có nhiều kích thước khác nhau, từ loại siêu nhỏ 4mm (được sử dụng để điều khiển chuyển động của camera trong điện thoại thông minh) đến những loại khổng lồ như NEMA 57.
Động cơ có mô-men xoắn hoạt động, mô-men xoắn này quyết định liệu nó có đáp ứng được nhu cầu công suất của bạn hay không.
Ví dụ: Động cơ NEMA17 thường được sử dụng trong máy in 3D và thiết bị CNC cỡ nhỏ, còn các động cơ NEMA lớn hơn được sử dụng trong sản xuất công nghiệp.
NEMA17 ở đây đề cập đến đường kính ngoài của động cơ là 17 inch, tương đương với 43 cm khi quy đổi sang centimet.
Ở Trung Quốc, chúng ta thường dùng centimet và milimét để đo kích thước, chứ không phải inch.
6. Số bước của động cơ:
Số bước trên mỗi vòng quay của động cơ quyết định độ phân giải và độ chính xác của nó. Động cơ bước có từ 4 đến 400 bước trên mỗi vòng quay. Thông thường người ta sử dụng 24, 48 và 200 bước.
Độ chính xác thường được mô tả bằng mức độ của mỗi bước. Ví dụ, bước của động cơ 48 bước là 7,5 độ.
Tuy nhiên, nhược điểm của độ chính xác cao là tốc độ và mô-men xoắn. Ở cùng tần số, tốc độ của động cơ độ chính xác cao thường thấp hơn.

7. Hộp số:
Một cách khác để cải thiện độ chính xác và mô-men xoắn là sử dụng hộp số.
Ví dụ, hộp số 32:1 có thể chuyển đổi động cơ 8 bước thành động cơ chính xác 256 bước, đồng thời tăng mô-men xoắn lên 8 lần.
Nhưng tốc độ đầu ra sẽ giảm tương ứng xuống còn một phần tám so với tốc độ ban đầu.
Động cơ nhỏ cũng có thể đạt được hiệu quả mô-men xoắn cao thông qua hộp số giảm tốc.
8. Trục:
Điều cuối cùng bạn cần xem xét là làm thế nào để khớp trục truyền động của động cơ với hệ thống truyền động của bạn.
Các loại trục bao gồm:
Trục tròn / Trục chữ D: Loại trục này là loại trục đầu ra tiêu chuẩn nhất, được sử dụng để kết nối ròng rọc, bộ bánh răng, v.v. Trục chữ D phù hợp hơn cho mô-men xoắn cao để tránh trượt.
Trục bánh răng: Trục đầu ra của một số động cơ là một bánh răng, được sử dụng để khớp với một hệ thống bánh răng cụ thể.
Trục vít: Một động cơ có trục vít được sử dụng để chế tạo bộ truyền động tuyến tính, và có thể thêm một con trượt để đạt được khả năng điều khiển tuyến tính.
Vui lòng liên hệ với chúng tôi nếu bạn quan tâm đến bất kỳ loại động cơ bước nào của chúng tôi.
Thời gian đăng bài: 29 tháng 1 năm 2022