Vòng kínđộng cơ bướcđã thay đổi tỷ lệ hiệu suất/chi phí trong nhiều ứng dụng điều khiển chuyển động. Sự thành công của động cơ tuần tự vòng kín VIC cũng mở ra khả năng thay thế động cơ servo đắt tiền bằng động cơ servo giá rẻ.động cơ bướcTrong ngày càng nhiều ứng dụng tự động hóa công nghiệp tiêu chuẩn cao, những tiến bộ công nghệ đang thay đổi tỷ lệ hiệu suất trên chi phí giữa động cơ bước và động cơ servo.
Động cơ bước so với động cơ servo
Theo quan niệm thông thường, hệ thống điều khiển servo hoạt động tốt hơn trong các ứng dụng yêu cầu tốc độ trên 800 vòng/phút và phản hồi động cao. Động cơ bước phù hợp hơn với các ứng dụng có tốc độ thấp, gia tốc từ thấp đến trung bình và mô-men xoắn giữ cao.
Vậy đâu là cơ sở cho quan niệm thông thường này về động cơ bước và động cơ servo? Chúng ta hãy cùng phân tích chi tiết hơn bên dưới.
1. Sự đơn giản và chi phí
Động cơ bước không chỉ rẻ hơn động cơ servo mà còn dễ vận hành và bảo trì hơn. Động cơ bước ổn định khi dừng và giữ nguyên vị trí (ngay cả khi chịu tải động). Tuy nhiên, nếu cần hiệu suất cao hơn cho một số ứng dụng nhất định, cần phải sử dụng động cơ servo đắt tiền và phức tạp hơn.
2. Cấu trúc
Động cơ bướcXoay theo kiểu bậc thang, sử dụng cuộn dây từ tính để từ từ kéo nam châm từ vị trí này sang vị trí khác. Để di chuyển động cơ 100 vị trí theo bất kỳ hướng nào, mạch cần thực hiện 100 thao tác bước trên động cơ. Động cơ bước sử dụng xung để đạt được chuyển động gia tăng, cho phép định vị chính xác mà không cần sử dụng bất kỳ cảm biến phản hồi nào.
Phương thức chuyển động của động cơ servo thì khác. Nó kết nối một cảm biến vị trí - tức là một bộ mã hóa - với rotor từ và liên tục phát hiện vị trí chính xác của động cơ. Servo theo dõi sự khác biệt giữa vị trí thực tế của động cơ và vị trí được chỉ thị và điều chỉnh dòng điện cho phù hợp. Hệ thống vòng kín này giữ cho động cơ ở trạng thái chuyển động chính xác.

3. Tốc độ và mô-men xoắn
Sự khác biệt về hiệu suất giữa động cơ bước và động cơ servo bắt nguồn từ các giải pháp thiết kế động cơ khác nhau của chúng.Động cơ bướcĐộng cơ bước có số cực lớn hơn nhiều so với động cơ servo, do đó, một vòng quay đầy đủ của động cơ bước đòi hỏi nhiều trao đổi dòng điện hơn trong cuộn dây, dẫn đến mô-men xoắn giảm nhanh khi tăng tốc độ. Ngoài ra, nếu đạt mô-men xoắn cực đại, động cơ bước có thể mất chức năng đồng bộ tốc độ. Vì những lý do này, động cơ servo là giải pháp được ưu tiên trong hầu hết các ứng dụng tốc độ cao. Ngược lại, số cực lớn hơn của động cơ bước lại có lợi thế ở tốc độ thấp hơn, khi động cơ bước có lợi thế về mô-men xoắn so với động cơ servo cùng kích thước.
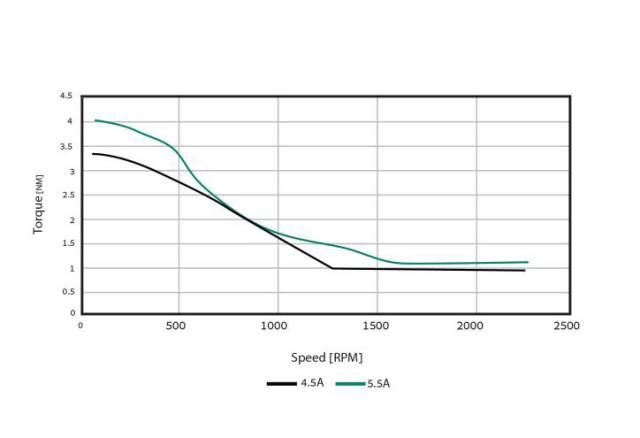
Khi tốc độ tăng, mô-men xoắn của động cơ bước giảm
4. Định vị
Có những khác biệt quan trọng giữa động cơ bước và động cơ servo trong các ứng dụng đòi hỏi phải luôn biết chính xác vị trí của máy. Trong các ứng dụng chuyển động vòng hở được điều khiển bởi động cơ bước, hệ thống điều khiển giả định rằng động cơ luôn ở trạng thái chuyển động chính xác. Tuy nhiên, sau khi gặp sự cố, chẳng hạn như động cơ bị chết máy do linh kiện bị kẹt, bộ điều khiển không thể biết vị trí thực tế của máy, điều này có thể dẫn đến mất vị trí. Hệ thống vòng kín của động cơ servo có một ưu điểm: nếu bị kẹt bởi vật thể, nó sẽ phát hiện ngay lập tức. Máy sẽ ngừng hoạt động và không bao giờ bị lệch vị trí.
5. Tiêu thụ nhiệt và năng lượng
Động cơ bước vòng hở sử dụng dòng điện cố định và tỏa ra nhiều nhiệt. Điều khiển vòng kín chỉ cung cấp dòng điện cần thiết cho vòng điều tốc và do đó tránh được vấn đề động cơ bị nóng.
Tóm tắt so sánh
Hệ thống điều khiển servo phù hợp nhất với các ứng dụng tốc độ cao liên quan đến thay đổi tải trọng động, chẳng hạn như cánh tay robot. Mặt khác, hệ thống điều khiển bước phù hợp hơn với các ứng dụng yêu cầu gia tốc từ thấp đến trung bình và mô-men xoắn giữ cao, chẳng hạn như máy in 3D, băng tải, trục phụ, v.v. Vì động cơ bước rẻ hơn, chúng có thể giảm chi phí cho các hệ thống tự động hóa khi sử dụng. Các hệ thống điều khiển chuyển động cần tận dụng các đặc tính của động cơ servo sẽ phải chứng minh rằng những động cơ có chi phí cao hơn này xứng đáng với giá trị của chúng.
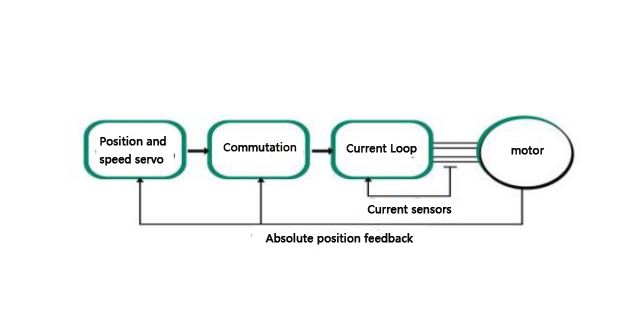
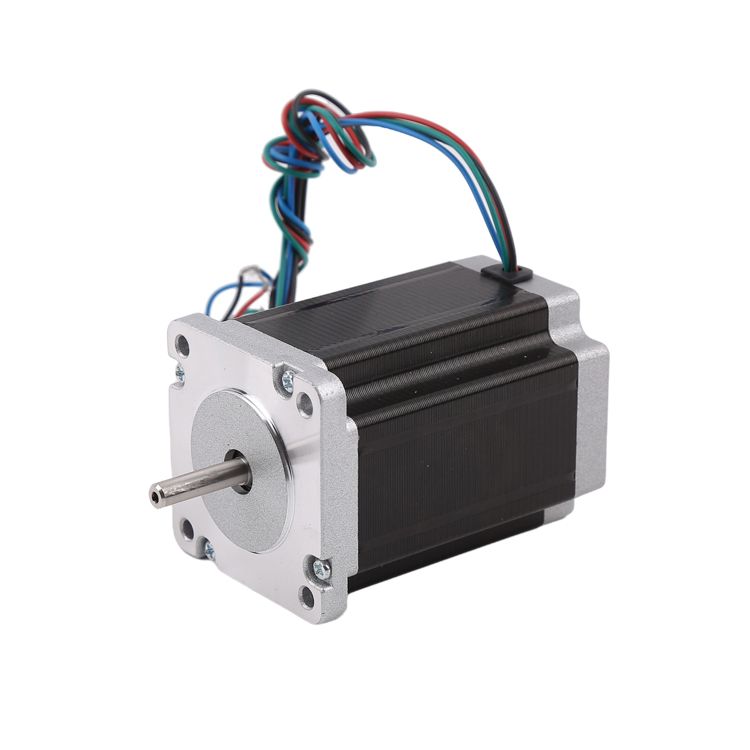
Động cơ bước với điều khiển vòng kín
Động cơ bước tích hợp điều khiển điện tử tương đương với động cơ DC không chổi than hai pha và có thể thực hiện điều khiển vòng lặp vị trí, điều khiển vòng lặp tốc độ, điều khiển DQ và các thuật toán khác. Bộ mã hóa tuyệt đối một vòng được sử dụng để chuyển mạch vòng kín, do đó đảm bảo mô-men xoắn tối ưu ở mọi tốc độ.
Tiêu thụ năng lượng thấp và giữ mát
Động cơ bước VIC có hiệu suất năng lượng cao. Không giống như động cơ bước vòng hở, luôn hoạt động theo dòng điện tối đa và gây ra các vấn đề về nhiệt và tiếng ồn, dòng điện thay đổi tùy theo điều kiện thực tế của chuyển động, ví dụ như khi tăng tốc và giảm tốc. Tương tự như servo, dòng điện tiêu thụ bởi các động cơ bước này tại bất kỳ thời điểm nào cũng tỷ lệ thuận với mô-men xoắn thực tế cần thiết. Nhờ động cơ và bảng điều khiển điện tử tích hợp chạy mát hơn, động cơ bước VIC có thể đạt mô-men xoắn cực đại cao hơn so với động cơ servo.
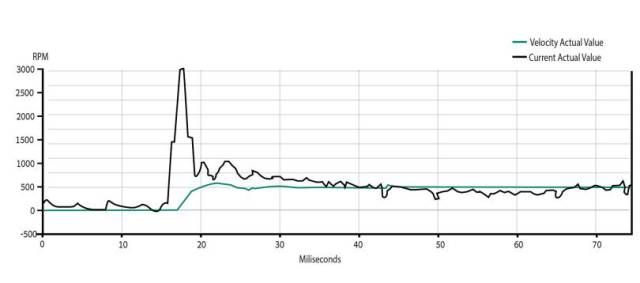
Ngay cả ở tốc độ cao, động cơ bước VIC vẫn cần ít dòng điện hơn
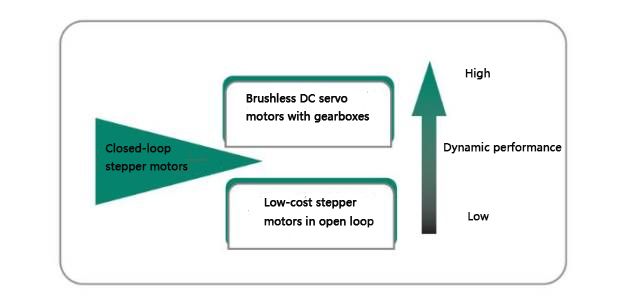
Được thúc đẩy bởi những tiến bộ trong công nghệ vòng kín, động cơ bước có thể thâm nhập vào các ứng dụng hiệu suất cao, tốc độ cao mà trước đây chỉ dành riêng cho động cơ servo
Động cơ bước với công nghệ vòng kín
Sẽ thế nào nếu những ưu điểm của công nghệ servo vòng kín có thể được áp dụng cho động cơ bước?
Liệu chúng ta có thể đạt được hiệu suất tương đương với động cơ servo trong khi vẫn tận dụng được lợi thế về chi phí của động cơ bước không?
Bằng cách kết hợp công nghệ điều khiển vòng kín, động cơ bước sẽ trở thành một sản phẩm toàn diện với những ưu điểm của cả động cơ servo và động cơ bước với chi phí thấp. Nhờ cải thiện đáng kể hiệu suất và hiệu quả năng lượng, động cơ bước vòng kín có thể thay thế các động cơ servo đắt tiền hơn trong ngày càng nhiều ứng dụng tiêu chuẩn cao.
Sau đây là một ví dụ về động cơ bước tích hợp VIC với điều khiển vòng kín nhúng để giải thích hiệu suất cũng như ưu điểm và nhược điểm của động cơ bước với công nghệ vòng kín.
Yêu cầu hiệu suất được đáp ứng chính xác
Để đảm bảo mô-men xoắn đủ để khắc phục nhiễu và tránh mất bước, động cơ bước vòng hở thường cần đảm bảo mô-men xoắn cao hơn ít nhất 40% so với giá trị yêu cầu của ứng dụng. Động cơ bước vòng kín ngày nay không gặp phải vấn đề này. Khi các động cơ bước này bị dừng do quá tải, chúng sẽ tiếp tục duy trì tải mà không bị mất mô-men xoắn. Chúng sẽ tiếp tục hoạt động sau khi tình trạng quá tải được loại bỏ. Mô-men xoắn cực đại có thể được đảm bảo ở bất kỳ tốc độ nào và cảm biến vị trí đảm bảo không bị mất bước. Do đó, động cơ bước vòng kín có thể được chỉ định để đáp ứng chính xác các yêu cầu mô-men xoắn của ứng dụng liên quan mà không cần thêm biên độ 40%.
Với động cơ bước vòng hở, việc đáp ứng yêu cầu mô-men xoắn tức thời cao khó khăn do nguy cơ mất bước. So với động cơ bước thông thường, động cơ bước vòng kín VIC có thể đạt được gia tốc rất nhanh, tiếng ồn vận hành thấp và cộng hưởng thấp. Chúng có thể hoạt động ở băng thông cao hơn nhiều và đạt hiệu suất tuyệt vời.
Không có tủ
Toda tích hợp bảng điều khiển truyền động với động cơ, giúp giảm thiểu số lượng dây điện và đơn giản hóa giải pháp triển khai. Với Toda, bạn có thể chế tạo máy mà không cần tủ điện.
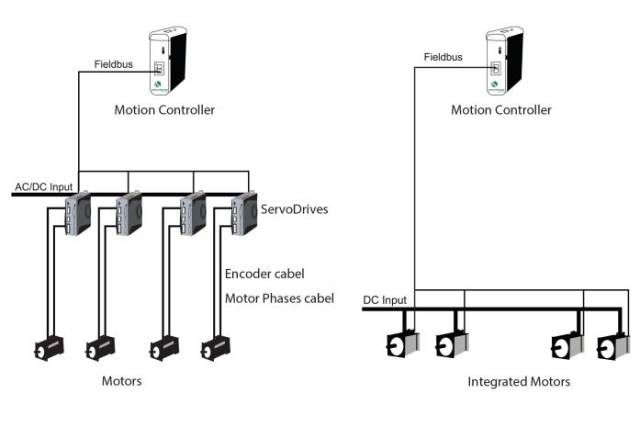
Tích hợp thiết bị điện tử với động cơ bước làm giảm độ phức tạp
Với công nghệ vòng kín, động cơ bước vòng kín mang đến cho người dùng độ chính xác và hiệu suất tuyệt vời, với hiệu suất của động cơ servo và chi phí thấp của động cơ bước. Động cơ bước giá rẻ đang dần thâm nhập vào các ứng dụng vốn bị chi phối bởi động cơ servo giá cao.
Thời gian đăng: 10-04-2023