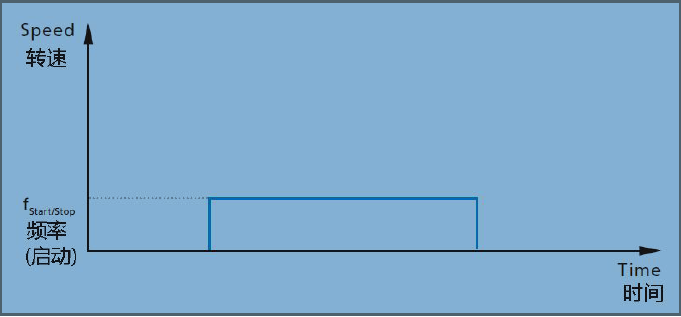
①Tùy thuộc vào loại biên dạng chuyển động, phương pháp phân tích sẽ khác nhau. Chế độ vận hành Khởi động-Dừng: Ở chế độ vận hành này, động cơ được nối với tải và hoạt động ở tốc độ không đổi. Động cơ phải tăng tốc tải (vượt qua quán tính và ma sát) trong bước đầu tiên đến tần số được yêu cầu.
Chế độ lỗi:Động cơ bướckhông khởi động
| Lý do | Giải pháp |
| Tải trọng quá cao | Chọn sai động cơ, hãy chọn động cơ lớn hơn. |
| Tần số quá cao | Giảm tần suất |
| Nếu động cơ dao động từ trái sang phải, có thể một pha bị đứt hoặc không được kết nối. | Thay thế hoặc sửa chữa động cơ |
| Dòng điện pha không phù hợp | Tăng dòng điện pha, ít nhất là trong giai đoạn đầu tiên. vài bước. |
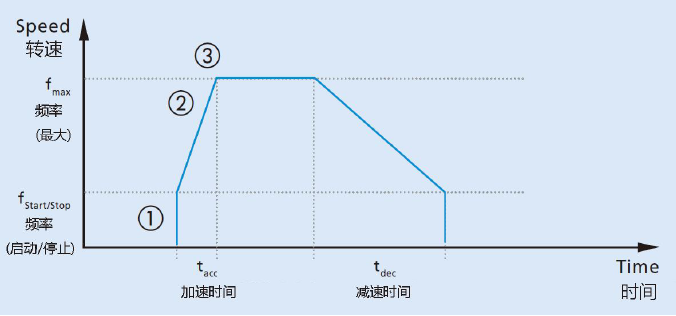
② Chế độ tăng tốc: Trong trường hợp này,Động cơ bướcĐược phép tăng tốc đến tần số tối đa với tốc độ tăng tốc được thiết lập sẵn trong trình điều khiển.
Lỗi: Động cơ bước không khởi động
Vì những lý do vàgiải phápXem mục ① "Thao tác Khởi động-Dừng".
Lỗi: Động cơ bước không hoàn thành quá trình tăng tốc.
| Lý do | Giải pháp |
| Động cơ bị kẹt ở tần số cộng hưởng | ● Tăng gia tốc để vượt qua điểm cộng hưởngtần số nhanh chóng●Chọn tần số bắt đầu-dừng cao hơn điểm cộng hưởng●Sử dụng nửa bước hoặc bước nhỏ●Thêm bộ giảm chấn cơ học, có thể có dạng...đĩa quán tính trên trục sau |
| Điện áp hoặc dòng điện nguồn được cài đặt sai (quá thấp) | ● Tăng điện áp hoặc dòng điện (cho phép đặt giá trị cao hơn)(trong một thời gian ngắn)●Kiểm tra động cơ có trở kháng thấp hơn●Sử dụng bộ điều khiển dòng điện không đổi (nếu sử dụng bộ điều khiển điện áp không đổi) |
| Tốc độ tối đa quá cao | ●Giảm tốc độ tối đa●Giảm độ dốc gia tốc |
| Chất lượng kém của đoạn tăng tốc từ...điện tử (xảy ra với các đường dốc kỹ thuật số) | ●Hãy thử với người lái xe khác |
Lỗi xảy ra: Động cơ bước hoàn thành quá trình tăng tốc nhưng bị kẹt khi đạt tốc độ ổn định.
| Lý do | Giải pháp |
| Động cơ bước đang hoạt động ở giới hạn công suất của nó. Khả năng vận hành và hiện tượng chết máy do gia tốc quá cao. Vị trí cân bằng đã bị vượt quá. gây ra hiện tượng rung động và mất ổn định của rôto. | ● Chọn tốc độ gia tốc nhỏ hơn hoặc sử dụng hai tốc độ khác nhaumức gia tốc, cao lúc khởi động, giảm dần khi đạt tốc độ tối đa.●Tăng mô-men xoắn● Lắp thêm bộ giảm chấn cơ học vào trục sau. Lưu ý rằngĐiều này sẽ làm tăng quán tính của rôto và có thể không giải quyết được vấn đề.nếu tốc độ tối đa đạt đến giới hạn của động cơ. ●Điều khiển động cơ bằng phương pháp vi bước |
③ Khối lượng công việc tăng dần theo thời gian
Trong một số trường hợp, động cơ hoạt động bình thường trong thời gian dài nhưng lại bị mất nhịp sau một thời gian. Trong trường hợp đó, rất có thể tải trọng tác động lên động cơ đã thay đổi. Nguyên nhân có thể là do sự mài mòn của ổ bi động cơ hoặc do một tác động bên ngoài.
Giải pháp:
● Kiểm tra sự hiện diện của tác động bên ngoài: Cơ cấu do động cơ điều khiển có thay đổi không?
● Kiểm tra độ mòn của ổ bi: Sử dụng ổ bi cầu thay vì ổ trượt thiêu kết để kéo dài tuổi thọ động cơ.
● Kiểm tra xem nhiệt độ môi trường có thay đổi không. Ảnh hưởng của nó đến độ nhớt của chất bôi trơn ổ trục là không nhỏ đối với động cơ siêu nhỏ. Sử dụng chất bôi trơn phù hợp với phạm vi hoạt động. (Ví dụ: chất bôi trơn có thể trở nên nhớt hơn ở nhiệt độ khắc nghiệt hoặc sau thời gian sử dụng kéo dài, điều này sẽ làm tăng tải trọng)
Thời gian đăng bài: 16/11/2022